Comparación de mapas de colores cíclicos
Empecé esta publicación buscando implementaciones de mapas de difusión en Python, que no pude encontrar. Me puse entonces a seguir un ejemplo sobre aprendizaje de variedades de Jake Vanderplas en un conjunto de datos diferente. Y funcionó bien
{kind=link}

pero el mapa de color es "Spectral", que es divergente. Esto me puso a pensar acerca de usar un mapa de colores cícliclo, y terminé en esta pregunta de StackOverflow. Y decidí comparar algunos mapas de colores cíclicos.
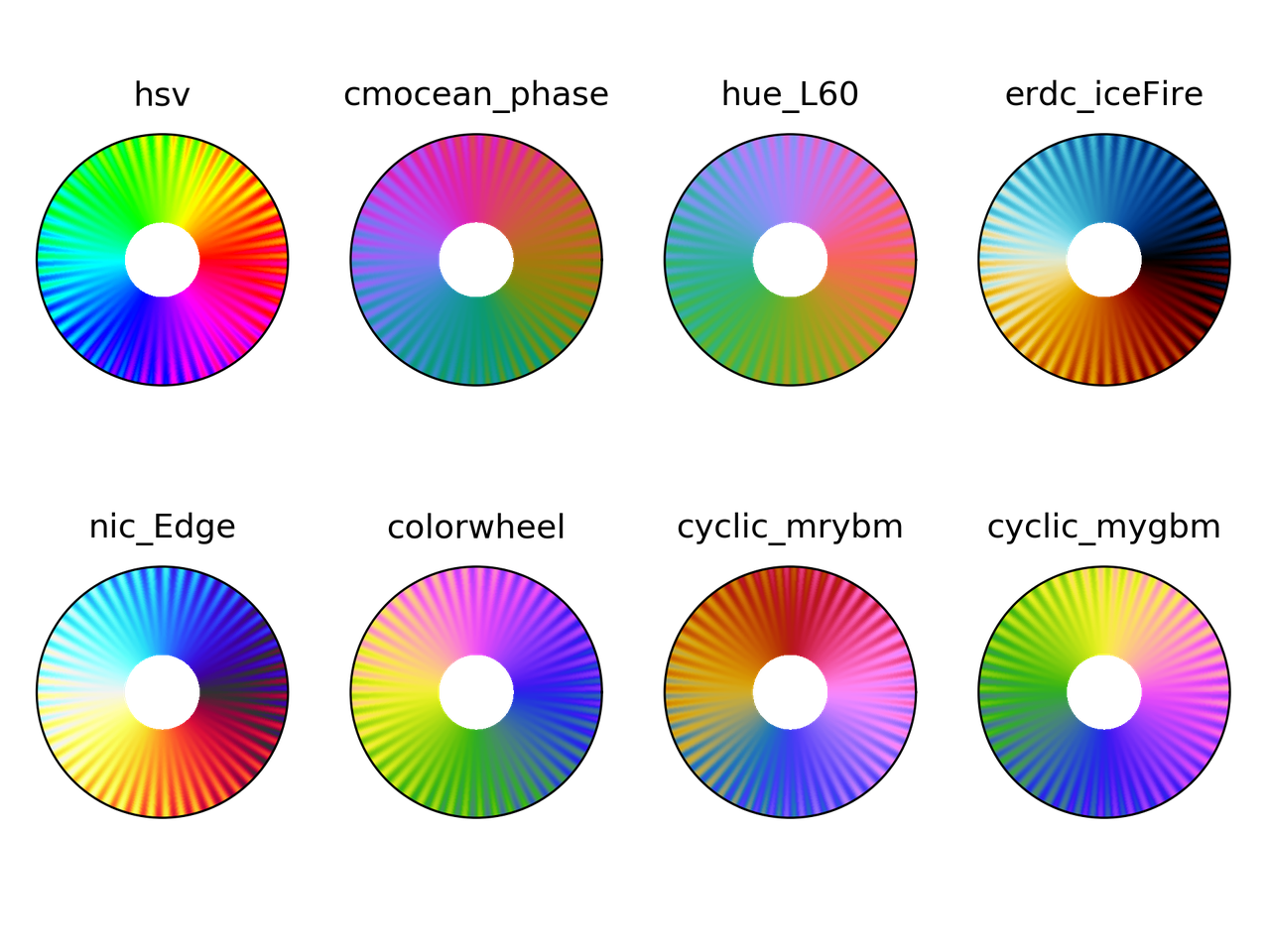
Elegí mapas de colores de diferentes fuentes
-
phase
-
hue_L60
erdc_iceFire
nic_Edge
-
colorwheel
cyclic_mrybm_35_75_c68
cyclic_mygbm_30_95_c78
y, obviamente, hsv. Los mapas de colores en formato de texto
plano se pueden descargar aquí.
Comparación
Para todos los ejemplos se importaron los siguientes módulos:
from __future__ import division, print_function import numpy as np import matplotlib.pyplot as plt from matplotlib.colors import LinearSegmentedColormap from colorspacious import cspace_convert
Imagen de prueba
Peter Kovesi propuso una manera de comparar mapas de colores cíclicos en un artículo en 2015. Consta de una rampa en espiral con ondulaciones. En coordenadas polares es
con \(A\) la amplitud de la oscilación, \(\rho\) el radio normalizado en [0, 1], \(p\) un número positivo, y \(n\) el número de ciclos.
Y la siguiente función crea la rejilla en Python.
def circle_sine_ramp(r_max=1, r_min=0.3, amp=np.pi/5, cycles=50, power=2, nr=50, ntheta=1025): r, t = np.mgrid[r_min:r_max:nr*1j, 0:2*np.pi:ntheta*1j] r_norm = (r - r_min)/(r_max - r_min) vals = amp * r_norm**power * np.sin(cycles*t) + t vals = np.mod(vals, 2*np.pi) return t, r, vals
El resultado es el siguiente
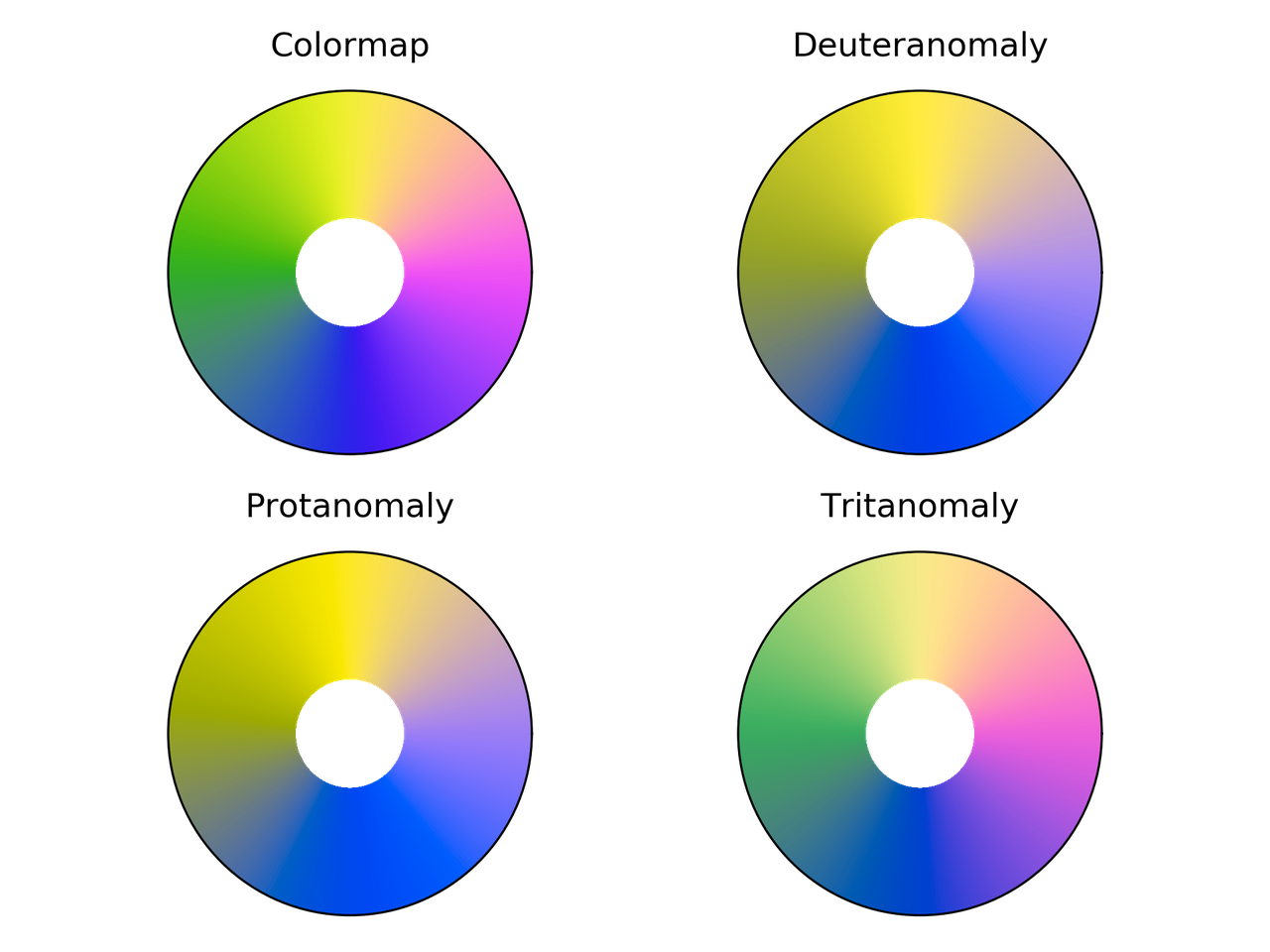
Prueba para daltonismo
t, r, vals = circle_sine_ramp(cycles=0) cmaps = ["hsv", "cmocean_phase", "hue_L60", "erdc_iceFire", "nic_Edge", "colorwheel", "cyclic_mrybm", "cyclic_mygbm"] severity = [0, 50, 50, 50] for colormap in cmaps: data = np.loadtxt(colormap + ".txt") fig = plt.figure() for cont in range(4): cvd_space = {"name": "sRGB1+CVD", "cvd_type": cvd_type[cont], "severity": severity[cont]} data2 = cspace_convert(data, cvd_space, "sRGB1") data2 = np.clip(data2, 0, 1) cmap = LinearSegmentedColormap.from_list('my_colormap', data2) ax = plt.subplot(2, 2, 1 + cont, projection="polar") ax.pcolormesh(t, r, vals, cmap=cmap) ax.set_xticks([]) ax.set_yticks([]) plt.suptitle(colormap) plt.tight_layout() plt.savefig(colormap + ".png", dpi=300)
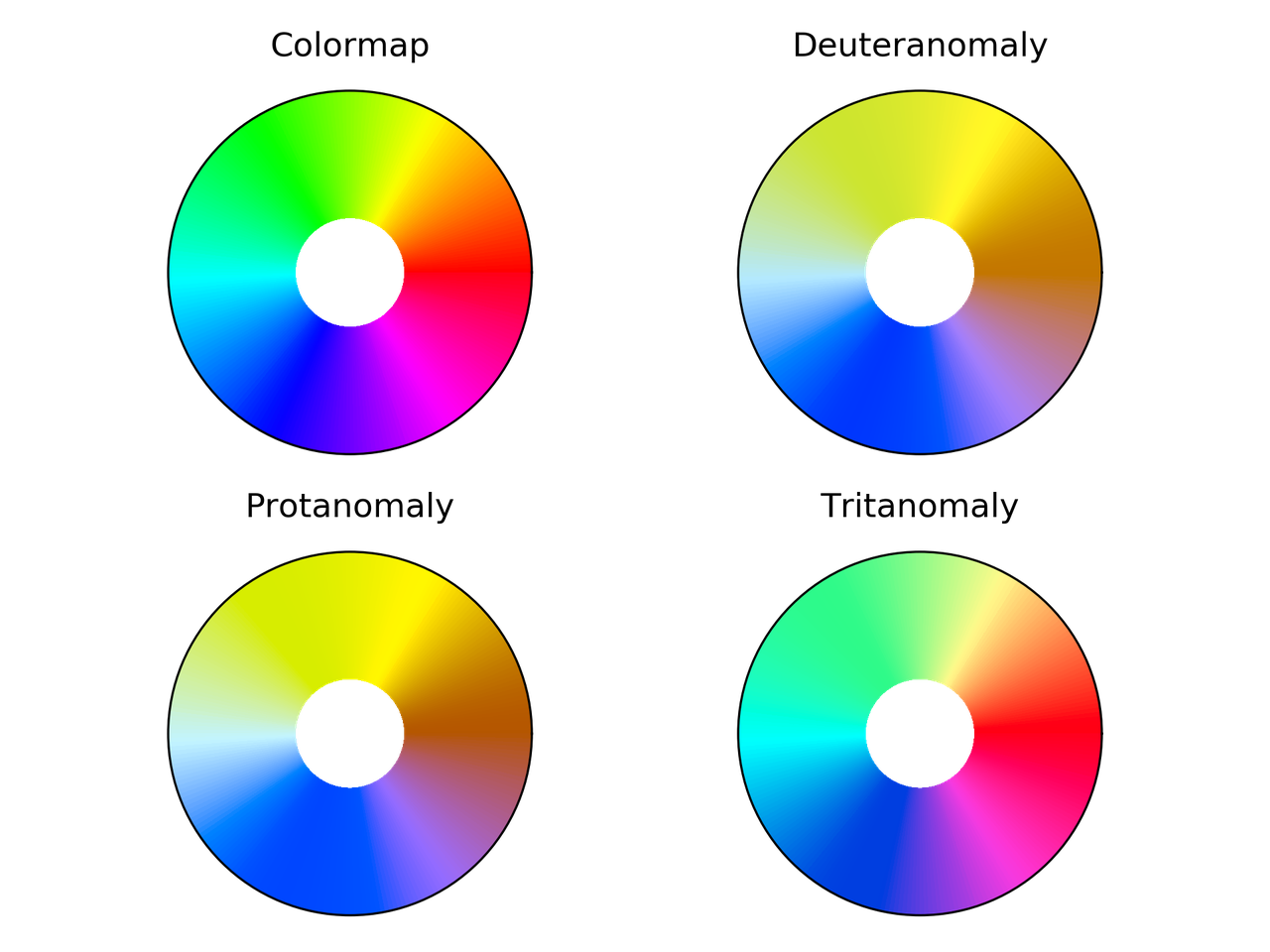
Comparación de hsv para diferentes deficiencias visuales
del color.
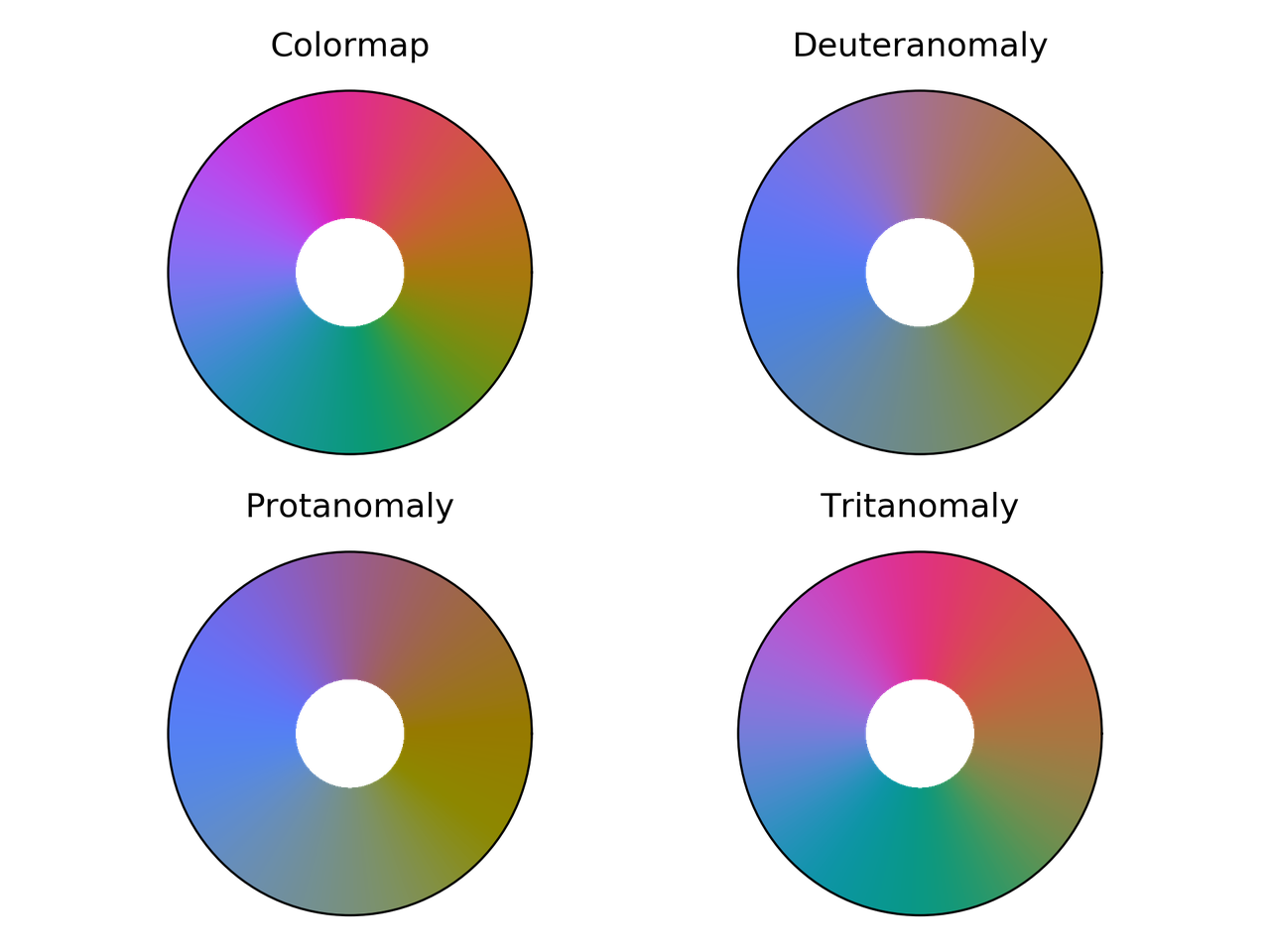
Comparación de Phase para diferentes deficiencias visuales
del color.
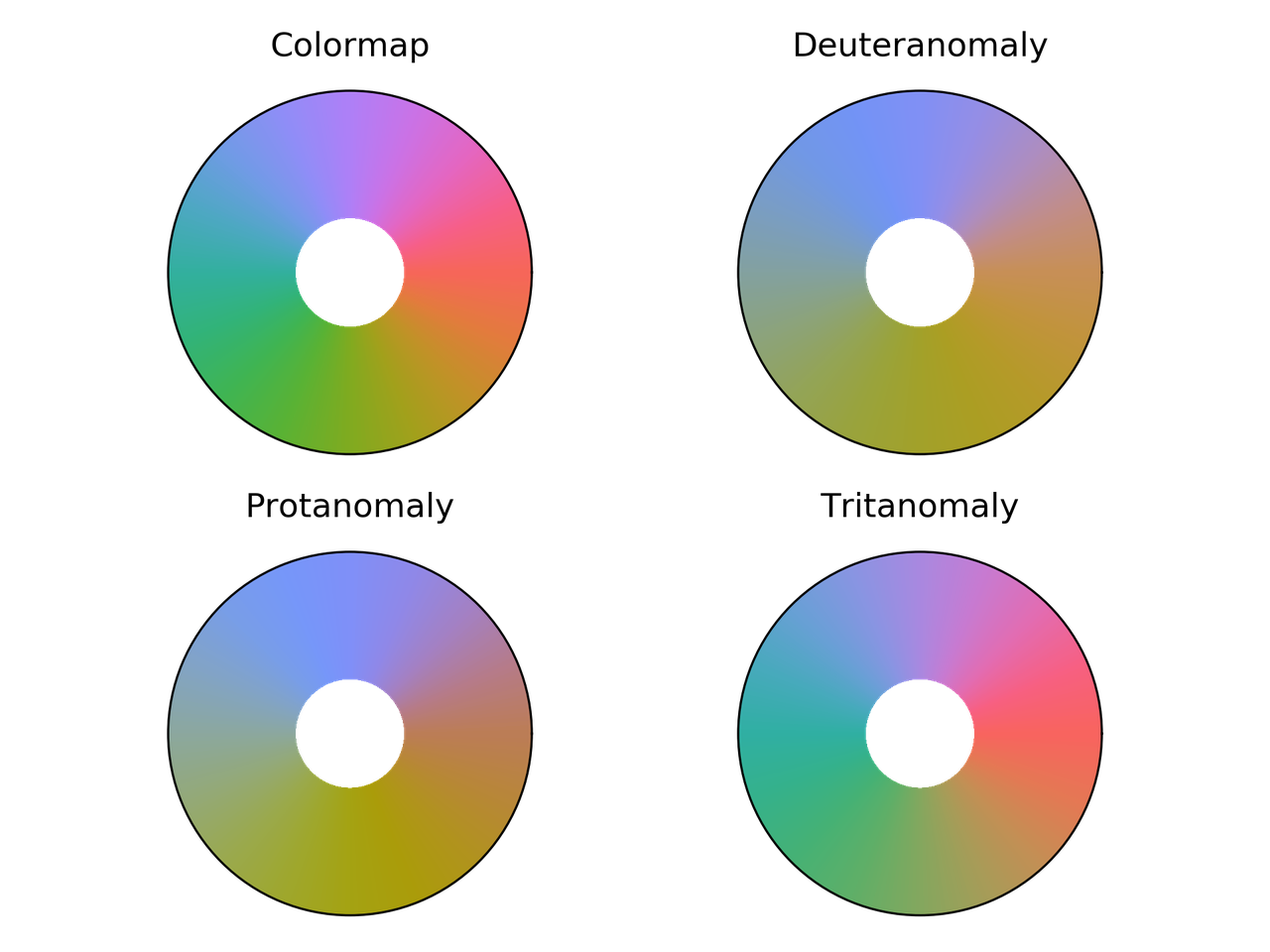
Comparación de hue_L60 para diferentes deficiencias visuales
del color.
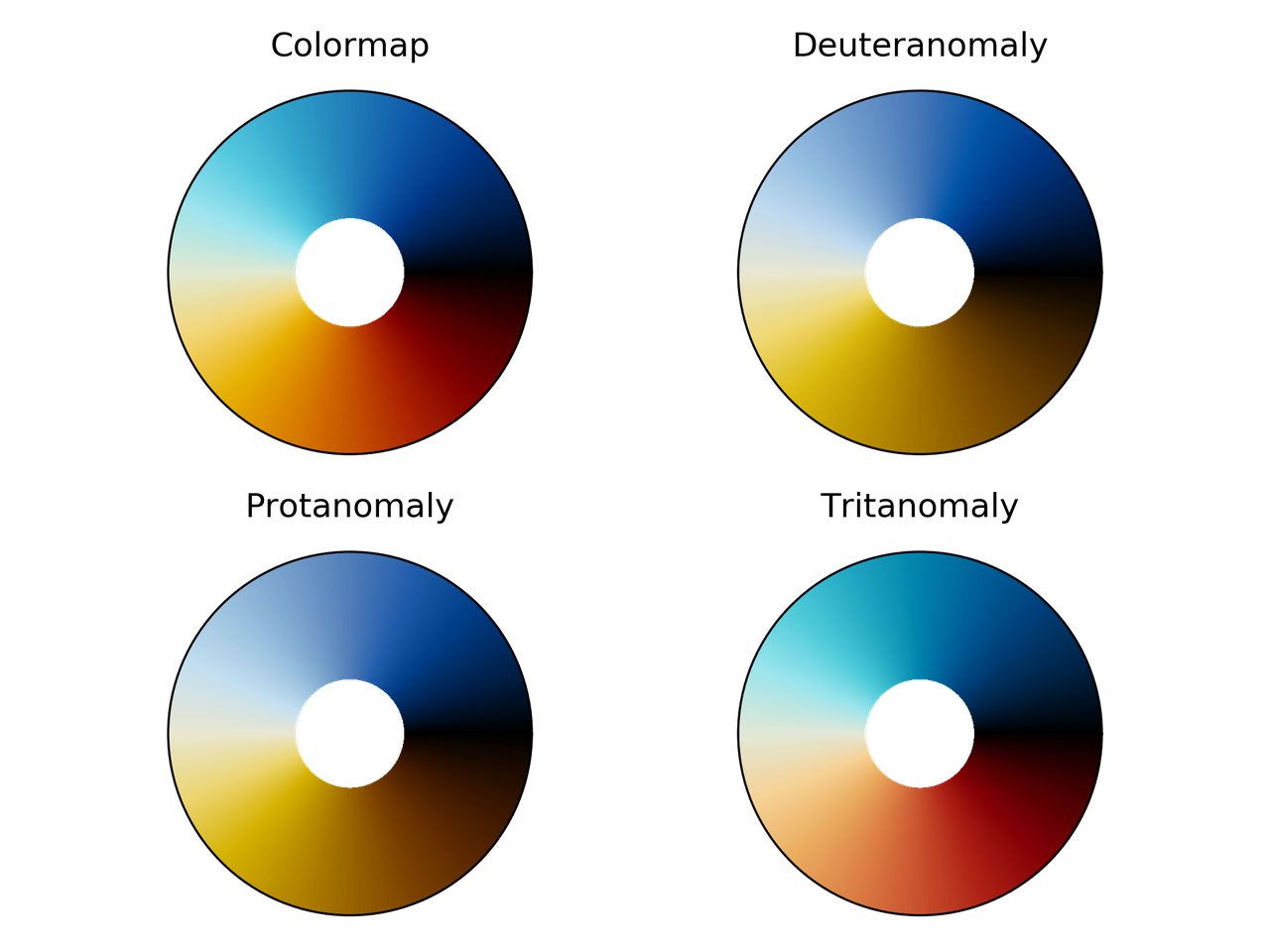
Comparación de erdc_iceFire para diferentes deficiencias visuales
del color.
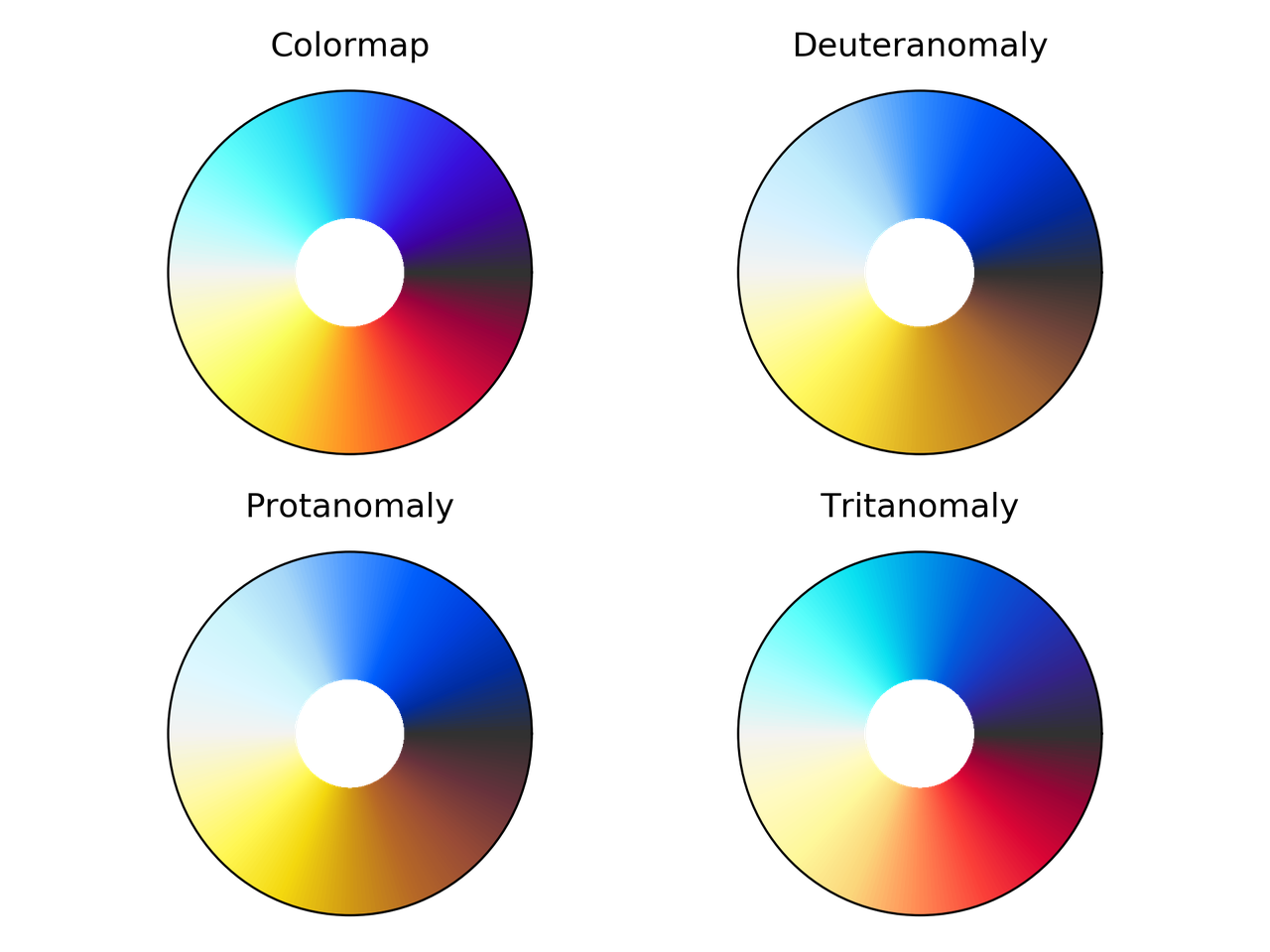
Comparación de nic_Edge para diferentes deficiencias visuales
del color.
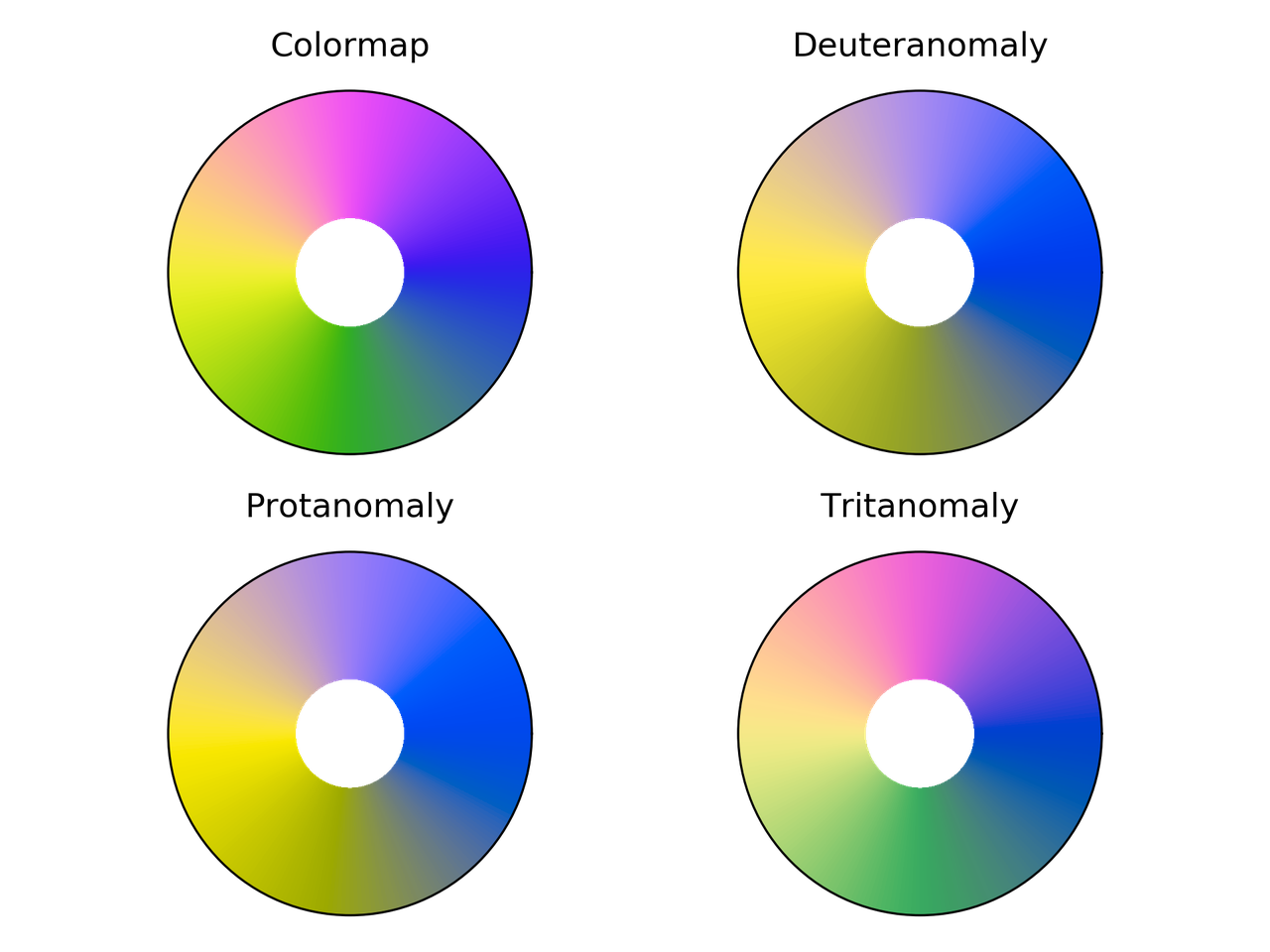
Comparación de Colorwheel para diferentes deficiencias visuales
del color.
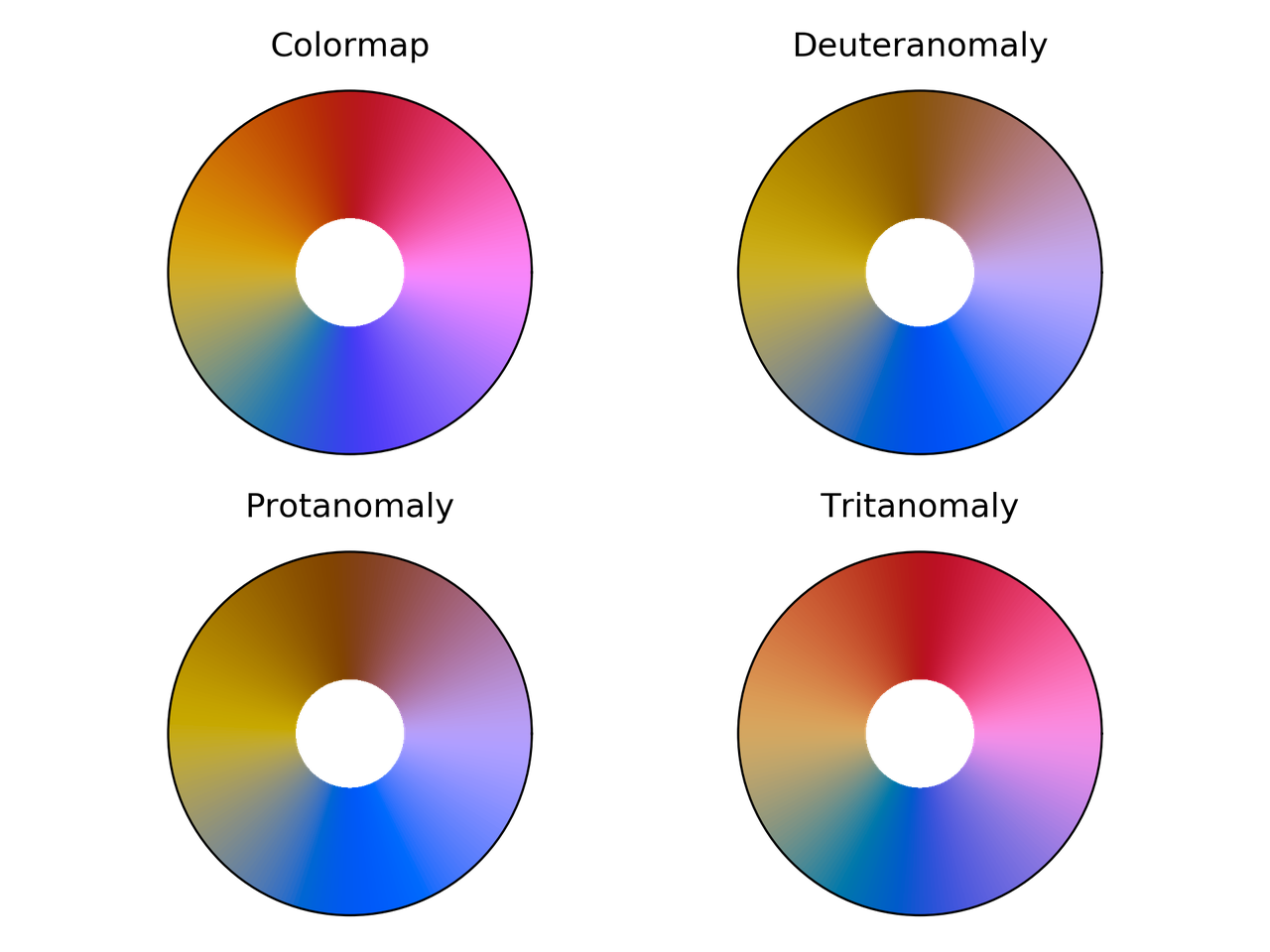
Comparación de Cyclic_mrybm para diferentes deficiencias visuales
del color.
Comparación de Cyclic_mygbm para diferentes deficiencias visuales
del color.
Mapas de colores cíclicos generados aleatoriamente
¿Qué pasa si generamos mapas de colores cíclicos aleatoriamente? ¿Cómo lucirían?
A continuación están las piezas de código y mapas de colores resultantes.
from __future__ import division, print_function import numpy as np from mpl_toolkits.mplot3d import Axes3D import matplotlib.pyplot as plt from matplotlib.colors import LinearSegmentedColormap # Next line to silence pyflakes. This import is needed. Axes3D plt.close("all") fig = plt.figure() fig2 = plt.figure() nx = 4 ny = 4 azimuths = np.arange(0, 361, 1) zeniths = np.arange(30, 70, 1) values = azimuths * np.ones((30, 361)) for cont in range(nx * ny): np.random.seed(seed=cont) rad = np.random.uniform(0.1, 0.5) center = np.random.uniform(rad, 1 - rad, size=(3, 1)) mat = np.random.rand(3, 3) rot_mat, _ = np.linalg.qr(mat) t = np.linspace(0, 2*np.pi, 256) x = rad*np.cos(t) y = rad*np.sin(t) z = 0.0*np.cos(t) X = np.vstack((x, y, z)) X = rot_mat.dot(X) + center ax = fig.add_subplot(ny, nx, 1 + cont, projection='polar') cmap = LinearSegmentedColormap.from_list('my_colormap', X.T) ax.pcolormesh(azimuths*np.pi/180.0, zeniths, values, cmap=cmap) ax.set_xticks([]) ax.set_yticks([]) ax2 = fig2.add_subplot(ny, nx, 1 + cont, projection='3d') ax2.plot(X[0, :], X[1, :], X[2, :]) ax2.set_xlim(0, 1) ax2.set_ylim(0, 1) ax2.set_zlim(0, 1) ax2.view_init(30, -60) ax2.set_xticks([0, 0.5, 1.0]) ax2.set_yticks([0, 0.5, 1.0]) ax2.set_zticks([0, 0.5, 1.0]) ax2.set_xticklabels([]) ax2.set_yticklabels([]) ax2.set_zticklabels([]) fig.savefig("random_cmaps.png", dpi=300, transparent=True) fig2.savefig("random_cmaps_traj.svg", transparent=True)
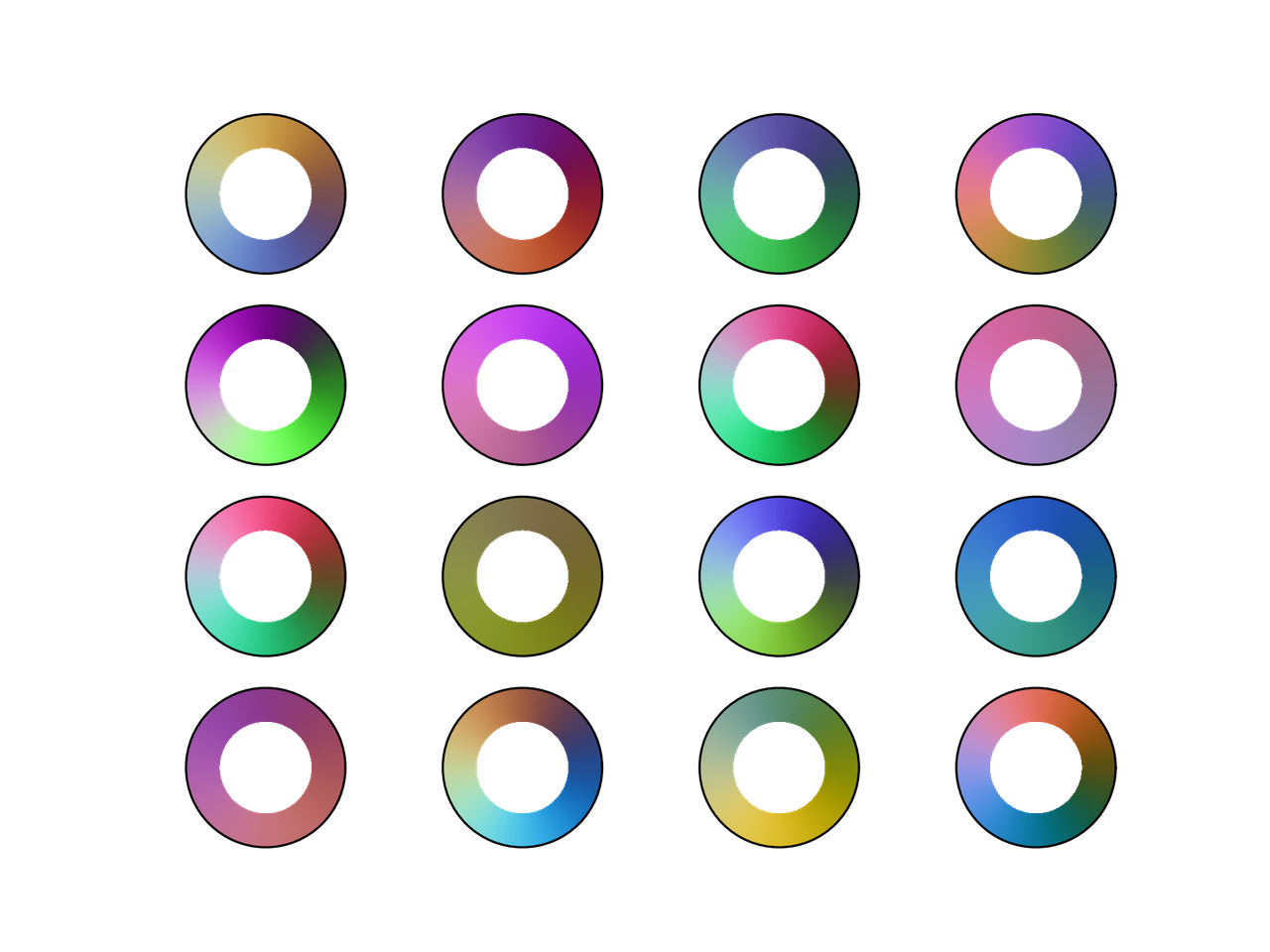
16 mapas de colores generados aleatoriamente.

Trayectorias en espacio RGB para los mapas de colores generados aleatoriamente.
Una idea interesante sería tomar estos mapas de colores y optimizar algunos parámetros perceptuales como luminosidad para obtener mapas de colores útiles.
Conclusiones
Probablemente, yo usaría phase, colorwheel, o mrybm en
el futuro.

Imagen inicial usando phase.

Imagen inicial usando colorwheel.

Imagen inicial usando mrybm.
Referencias
Peter Kovesi. Good Colour Maps: How to Design Them. arXiv:1509.03700 [cs.GR] 2015
Comentarios
Comments powered by Disqus